
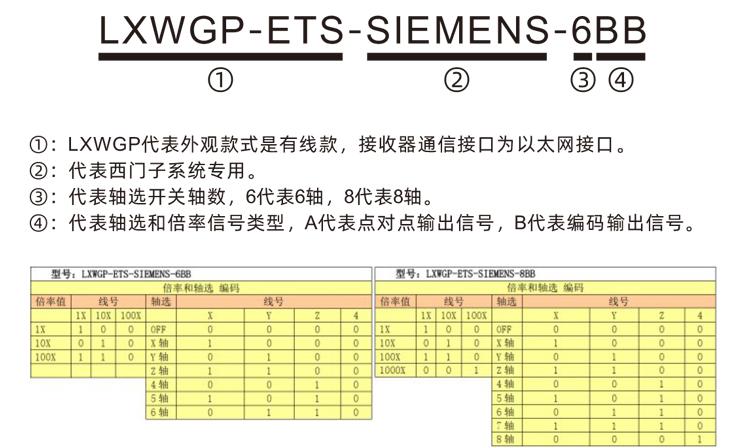
Roda tangan elektronik berkabel LXWGP-ETS-SIEMENS
Keterangan


电子手轮是用于数控机床手动引导、posisi、Operasi pemogokan。Model handwheel elektronik ini adalah handwheel elektronik berkabel Siemens dengan tampilan nyata.,Handwheel terhubung ke antarmuka X130 sistem Siemens melalui kabel jaringan.,Membaca koordinat sistem dan menampilkannya ke layar LCD handwheel melalui komunikasi protokol S7.,Dan pemilihan sumbu sistem kendali handwheel dapat dilakukan melalui komunikasi.、pembesaran、Tombol dan sinyal lainnya。

1.采用6芯航空插头线缆连接,手轮线缆长度10米。
2.手轮屏幕可以显示系统工件坐标、机械坐标、进给速度、轴选、倍率等信息。
3.Dukung tombol berhenti darurat,Beralih kuantitas output sinyal IO,手轮关机急停依然有效。
4.Mendukung 6 tombol khusus,Mengalihkan sinyal IO,可以通过IO接线或通信输出信号给系统。
5.支持6或8轴控制,Mengalihkan sinyal IO,可以通过IO接线或通信输出信号给系统。
6.支持3或4档倍率控制,Mengalihkan sinyal IO,可以通过IO接线或通信输出信号给系统。
7.Dukung Pulse Encoder,100Pulsa/putar,可以通过AB脉冲接线输出信号给系统。
8.Mendukung protokol Siemens S7,Mendukung Siemens 828D、840DSL、SATU dan sistem model lainnya。

| 手轮工作电源电压 | DC24V/1A |
| Tegangan catu daya penerima | DC24V/1A |
| 接收器IO输出负载范围 |
DC24V
|
| 手轮端线缆长度 |
10m
|
| 接收器端线缆长度 |
1m
|
| 接收器端网线长度 |
3m
|
| Suhu operasi |
-25℃<X<55℃
|
| Tinggi anti-jatuh |
1m
|
| Kustomisasi jumlah tombol | 6individu |
| Ukuran produk | 233*90.7*77.4(mm) |


Komentar:
①Tombol berhenti darurat:
Tekan tombol berhenti darurat,Dua kelompok output IO berhenti darurat pada penerima terputus,Dan semua fungsi handwheel tidak valid。
Setelah perhentian darurat dilepaskan,Stop darurat IO output ditutup pada penerima,Semua fungsi handwheel dipulihkan。
②Tampilan layar:
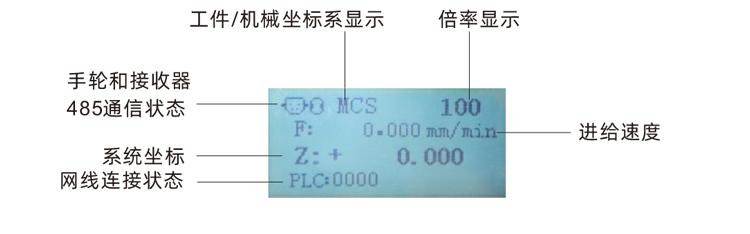
PLC:0000代表网线没有连通,PLC:1010代表网线和PLC系统连接成功,
PLC:1110代表手轮写入系统数据成功,PLC:0001代表连接电脑成功。
③Tombol khusus:
6Tombol khusus,Setiap tombol sesuai dengan titik output IO pada penerima,也通过通信与系统连接。
④ Sakelar pemilihan sumbu:
Beralih sakelar pemilihan sumbu dapat mengganti sumbu bergerak yang dikendalikan oleh handwheel。
⑤使能按钮:
Tekan dan tahan tombol aktifkan di kedua sisi,Ini efektif hanya dengan menggoyangkan encoder pulsa。 Dan 2 set output IO yang diaktifkan pada receiver dihidupkan,Lepaskan tombol aktifkan,Aktifkan pemutusan output IO。
⑥倍率开关:
Mengalihkan sakelar pembesaran dapat mengalihkan pembesaran yang dikendalikan oleh roda tangan.。
⑦脉冲编码器:
Tekan dan tahan tombol aktifkan,Mengguncang encoder pulsa,Kirim Sinyal Denyut Nadi,Kontrol gerakan poros mesin。
⑧手轮线缆:
手轮和接收器连接的线缆,航空插头,用于手轮供电和通信。



6.1Langkah Instalasi Produk
1.将接收器通过四个角的螺丝孔将其安装在电柜里。
2.Lihat Diagram Pengkabelan Penerima kami,Bandingkan peralatan di tempat Anda,Hubungkan perangkat melalui kabel dan penerima
menghubungkan,用网线把接收器和系统的X130接口连接好。
3.Setelah penerima diperbaiki,将航空插头底座安装在面板的手轮开孔位置,底座另一
端线排插在接收器上的手轮接口处。然后将手轮端线缆航空插头插入底座,拧紧
固定装置。
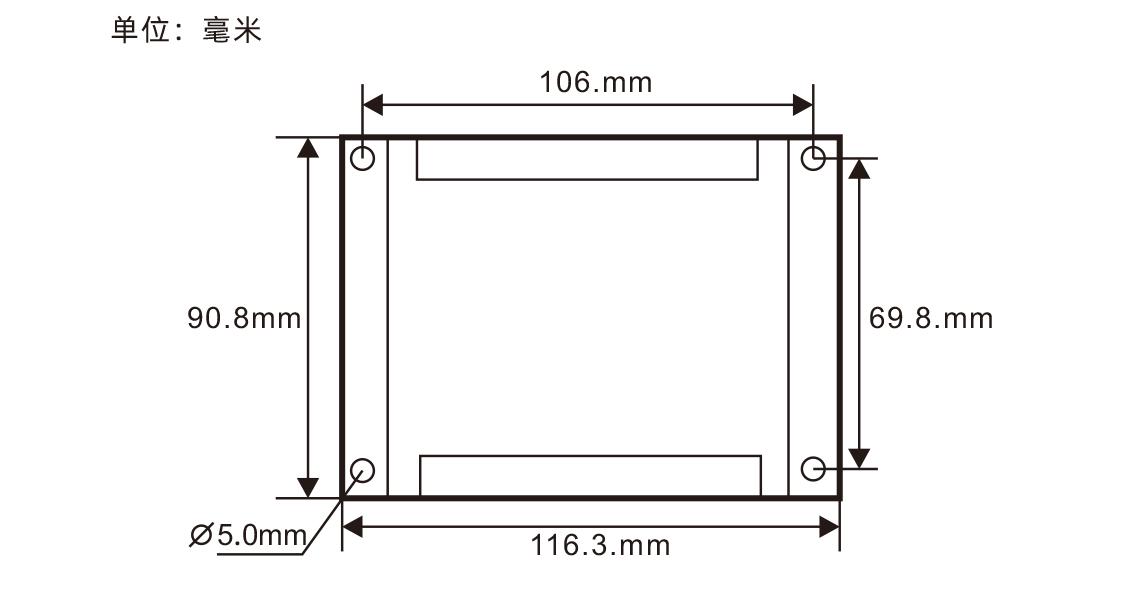
6.2Ukuran pemasangan penerima
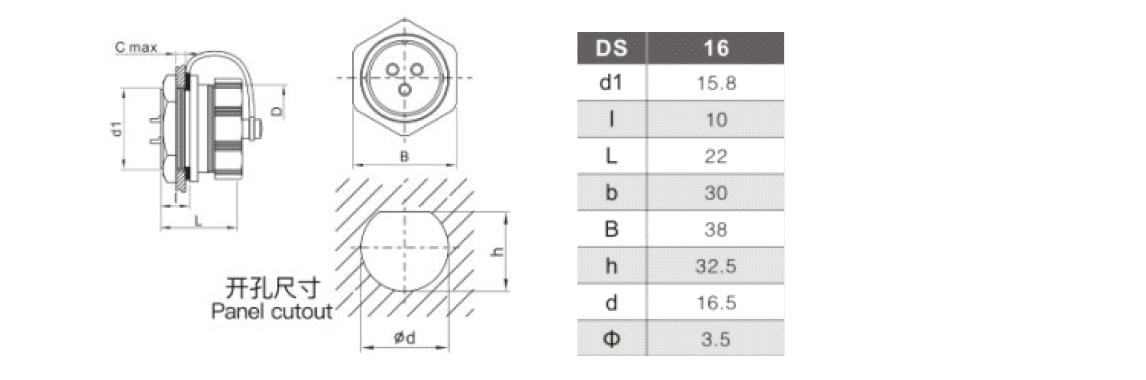
6.3航空插头安装尺寸
6.4Diagram referensi kabel penerima

6.2Ukuran pemasangan penerima
6.3航空插头安装尺寸
6.4Diagram referensi kabel penerima

1.Penerima didukung,Lampu operasi penerima menyala,用网线将接收器和电脑连接,设置电脑的固定IP地址,使用网络配置工具软件对手轮功能进行网络参数设置,具体设置
方法参考《LXWGP-ETS有线手轮的使用说明》。
2.接收器设置完成之后,系统需要编程PLC程序,具体请参考《LXWGP-ETS不同西门子数控系统的设置方法》以及PLC程序例程资料。
3.以上设置完成之后,将接收器拿到机器电柜安装好,网线从电脑拔出插到系统的X130接口上,接收器电源和脉冲线插好。
4.Mesinnya bertenaga,Penerima didukung,Lampu operasi penerima menyala,打开手轮电源开关,手轮屏幕开机,屏幕显示PLC:1010,代表手轮和系统通信成功。
5.选中轴选:Sakelar sakelar pemilihan gandar,Pilih sumbu yang ingin Anda operasikan。
6.Pilih pengganda:Beralih sakelar pembesaran,Pilih pengganda yang Anda butuhkan。
7.Pindahkan sumbu:Tekan dan tahan tombol aktifkan,Pilih sumbu dan sakelar,Pilih sakelar pengganda,Kemudian putar encoder pulsa,Putar sumbu gerakan ke depan searah jarum jam,Putar sumbu gerakan negatif berlawanan arah jarum jam。
8.Tekan dan tahan tombol khusus,Tombol IO yang sesuai dari output penerima dihidupkan,Lepaskan Output Tombol Tutup。
9.Tekan tombol berhenti darurat,Penerima memutuskan output berhenti darurat IO,Fungsi handwheel gagal,Lepaskan tombol berhenti darurat,Stop darurat IO output ditutup,Pemulihan fungsi handwheel。


| Situasi kesalahan | Kemungkinan penyebabnya |
Metode pemecahan masalah
|
|
|
Metode pemecahan masalah
|
1.手轮和接收器之间的航空线缆是否正确可靠连接
2.接收器电源电压是否足够
3.Kegagalan handwheel
|
1.检查手轮和接收器之间的航空线缆的连接情况
2.检查接收器输入电源
3.Hubungi produsen untuk kembali ke pabrik untuk pemeliharaan
|
|
| 手轮操作无反应 |
1.接收器和系统的网线是否连接
2.系统PLC程序是否写好
3.接收器配置是否设置正确
4.手轮显示屏485通信图标是否显示失败
5.Saat mengoperasikan handwheel,需要按住两侧的使能按钮
6.急停按钮是否释放
|
1.检查接收器和系统X130网口是否用网线连接
2.检查确认系统PLC是否按照我们提供的参考资料写好
3.检查确认接收器是否参考我们的资料和提供的工具软件,正确的设置了接收器的网络参数和DB地址等
4.检查手轮和接收器之间的
6芯绿色插座,其中的两根通信线:485-A和485-B,是否正确并牢固连接,是否存在断路的情况
|
|
|
Setelah penerima diberdayakan,接收器上工作灯不亮
|
1.Kelainan catu daya
2.Kesalahan kabel daya
3.Kegagalan penerima
|
1.Periksa apakah catu daya memiliki tegangan,
Apakah tegangan memenuhi persyaratan
2.Periksa apakah kutub positif dan negatif dari catu daya terhubung secara terbalik
3.Kembali ke pemeliharaan pabrik
|

1.Silakan pada suhu dan tekanan kamar,Digunakan di lingkungan kering,Memperpanjang masa pakai。
2.Harap hindari basah dalam hujan、Digunakan dalam lingkungan abnormal seperti lecet,Memperpanjang masa pakai。
3.Harap jaga handwheel bersih,Memperpanjang masa pakai。
4.Harap hindari pemerasan、Jatuh、Menabrak, dll.,Cegah aksesori presisi di dalam roda tangan dari kerusakan atau kesalahan akurasi。
5.Tidak digunakan untuk waktu yang lama,Silakan simpan handwheel di tempat yang bersih dan aman。
6.Perhatikan bukti kelembaban dan kejut selama penyimpanan dan transportasi。

1.Harap baca instruksi untuk digunakan secara detail sebelum digunakan,Personel non-profesional dilarang。
2.手轮出现任何非正常情况后,请立即停止使用,并且排查故障,在故障排除前,禁止再使用故障手轮,避免因手轮未知故障而发生安全事故;
3.Jika perbaikan diperlukan,Silakan hubungi produsen,Jika kerusakan yang disebabkan oleh perbaikan diri,Pabrikan tidak akan memberikan garansi。




.png)
