Automatyczne cięcie bezprzewodowego zdalnego sterowania dla piły liny Crawler
Rope ropa frawlera maszynowo-autoutomatyczne bezprzewodowe zdalne zdalne sterowanie DH12S-LD
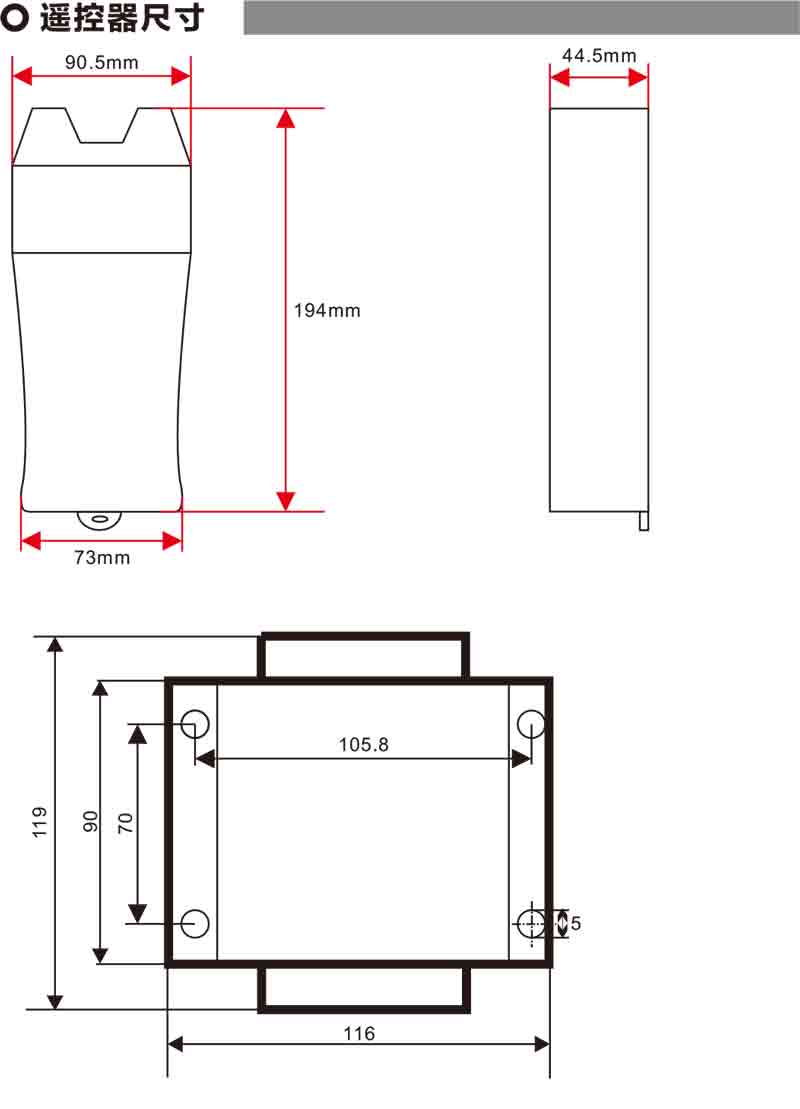
Opis

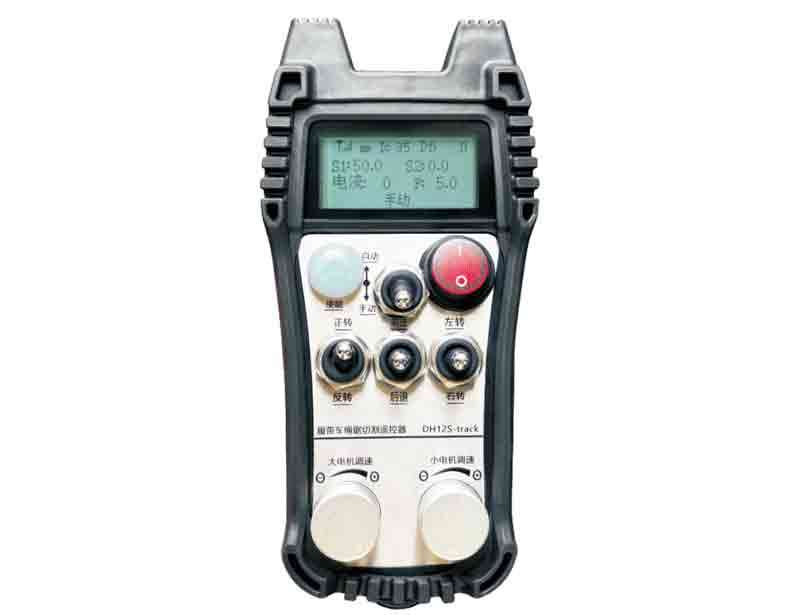
model:DH12S-LD Sprzęt adaptacyjny:Maszyna do piła

Uwaga:Można wybrać trzy rodzaje anten,Domyślna antena kubka ssania jest standardowa 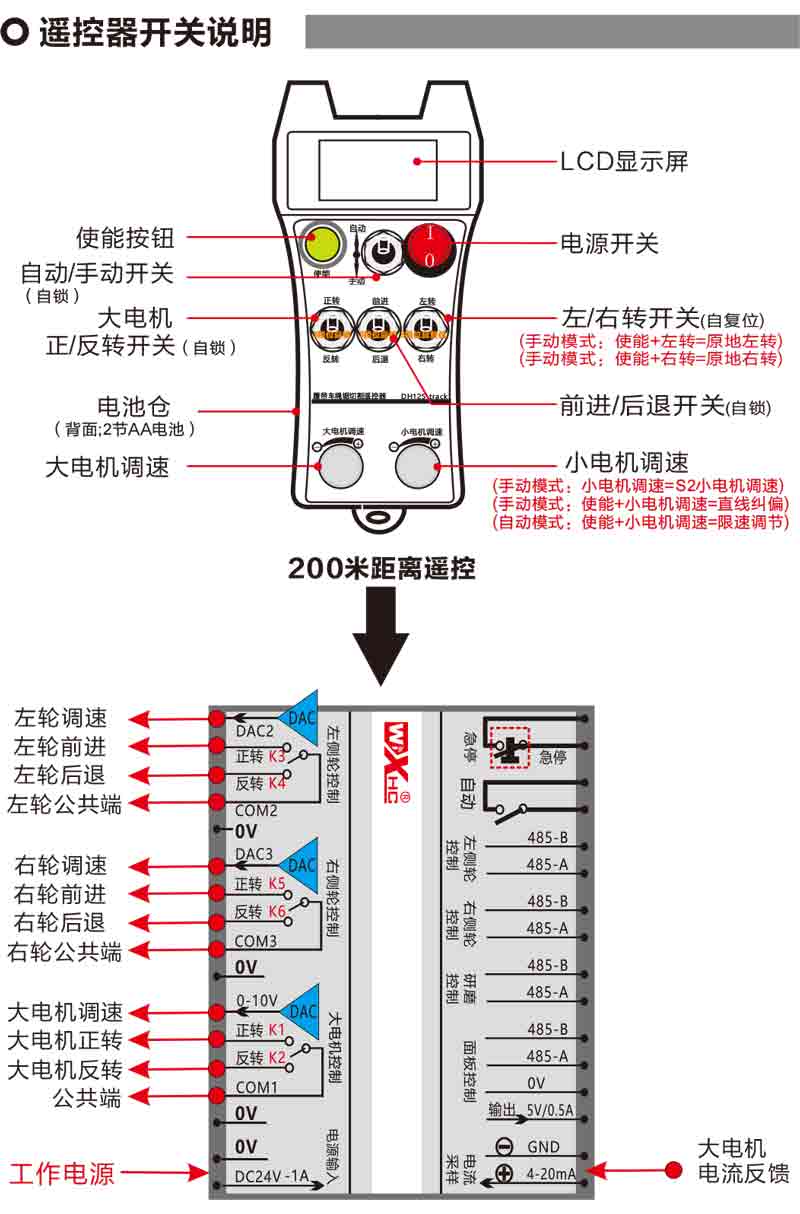

Duża prędkość silnika:S1:0-50
Mała prędkość silnika:S2:0-50
Automatyczne ograniczenie prędkości silnika cięcia:F:0-30(Parametry są regulowane)
Automatyczne maksymalne prąd cięcia:Ic:0-35(Parametry są regulowane)
Wartość korekcji odchylenia liniowego:Df:-99-99(1 jednostka to około 0,02 V)
Niskie ciśnienie:Bateria pilota jest zbyt niska,Proszę wymienić baterię
Wypadnij z Internetu:Przerwanie sygnału bezprzewodowego,Sprawdź zasilacz odbiornika,Znowu moc,Uruchom ponownie pilot
![]()
1、Włączone zdalne sterowanie
Odbiornik jest zasilany,Światło kierowane przez odbiornika zaczyna migać;Dwie baterie nr 5 zainstalowane na pilocie,Włącz przełącznik zasilania,Wyświetlacz prędkość silnika wyświetlacza,Oznacza to, że uruchomienie się powiodło。
2、Duża regulacja silnika i prędkości
Obróć przełącznik „do przodu/do tyłu” do przodu,Duży silnik odbiornika włącza,Wyświetlacz wyświetla obrót do przodu ;
;
Obróć przełącznik „do przodu/do tyłu” na odwrotność,Odbiornik duży odwrócenie silnika,Wyświetl inwersję wyświetlania ;
;
;Obróć przełącznik „do przodu/do tyłu” na odwrotność,Odbiornik duży odwrócenie silnika,Wyświetl inwersję wyświetlania
;Obróć pokrętło „dużej regulacji prędkości motorycznej”,Może dostosować napięcie wyjściowe odbiornika duża regulacja prędkości silnika 0-10 V;
3、Mała regulacja silnika i prędkości
Obróć przełącznik „do przodu/do tyłu” do przodu,Postęp rewolwerowy odbiornika i prawidłowe postępy otwarte,Wyświetl do przodu
Obróć przełącznik „do przodu/do tyłu” na tył,Otwarcie odwrócenia odbiornika i odwrócenie prawego koła,Wyświetl z powrotem
W trybie ręcznym:Obróć gałkę „mała regulacja prędkości motorycznej”,Jednocześnie dostosuj napięcie wyjściowe lewego kółka prawego koła Regulacja prędkości kółka 0-10 V;
W trybie ręcznym:Obróć gałkę „mała regulacja prędkości motorycznej”,Jednocześnie dostosuj napięcie wyjściowe lewego kółka prawego koła Regulacja prędkości kółka 0-10 V;
4、Skręć w lewo i w prawo
Obróć przełącznik „lewy/prawy” w lewo,Odbiornik prawe koło do otwarcia,Wyświetlacz skręca w lewo
Obróć przełącznik „lewy/prawy” w prawo,Odbiornik Revolver Advance się otwiera,Wyświetlacz wyświetla się w prawo
5、Odwracanie się
W trybie ręcznym:
Skręć w lewo na miejscu:Naciśnij i przytrzymaj przycisk Włącz,Obróć przełącznik „lewy/prawy” w lewo,Odwołanie odbiornika i prawe koła otwarte,Zacznij skręcać w lewo na miejscu;
Skręć w prawo na miejscu:Naciśnij i przytrzymaj przycisk Włącz,Obróć przełącznik „lewy/prawy” w prawo,Remoter,Zacznij skręcać w prawo na miejscu;
6、Mała regulacja ograniczenia prędkości silnika
W trybie automatycznym:Naciśnij i przytrzymaj przycisk Włącz,Obróć „mała regulacja prędkości silnika”, aby wyregulować maksymalną prędkość małego silnika podczas automatycznego cięcia;
7、Automatyczne cięcie
Pierwszy krok,Uruchom duży silnik;
Krok 2,Przełącz przełącznik trybu na „Auto”;
Krok 3,Uruchom mały silnik,Wyświetlacz ekranu wchodzi „Automatyczne”,Wskazuje, że wprowadzono tryb automatycznego cięcia;
Krok 2,Przełącz przełącznik trybu na „Auto”;
Krok 3,Uruchom mały silnik,Wyświetlacz ekranu wchodzi „Automatyczne”,Wskazuje, że wprowadzono tryb automatycznego cięcia;
8、Korekta linii prostej
Kiedy lewy i prawy silnik porusza się do przodu i do tyłu,Istnieje różnica w prędkości lewej i prawej,Spacer z prostą linią jest przesunięty,Można zastosować funkcję korekcji odchylenia liniowego zdalnego sterowania,Dostosuj prędkość lewych i prawych kół;
Zasada korekty:Poprzez funkcję korekcji uprzywilejowania,Drobna prędkość rewolweru,Aby osiągnąć taką samą prędkość, jak prawe koło,Zdać sobie sprawę z synchronizacji prędkości lewego i prawego koła,Wyeliminuj przesunięcia;
Metoda działania korekcji:W trybie ręcznym,Naciśnij i przytrzymaj przycisk Włącz,Obróć „Mała regulacja prędkości motorycznej”;
Obróć zgodnie z ruchem wskazówek zegara,Zwiększ napięcie prędkości rewolweru,Zwiększona wartość korekcji odchylenia ekranu wyświetlacza;
Obróć przeciwnie do ruchu wskazówek zegara,Zmniejsz napięcie prędkości rewolweru,Wartość korekcji odchylenia wyświetlania jest zmniejszona;
Zakres korekty:Wartość korekcji -90 do 90;1Napięcie korekcji odchylenia każdej jednostki korekcji odchylenia wynosi około 0,02 V;
9、Menu parametrów (użytkownika zabrania prywatnej modyfikacji)
Niektóre funkcje pilota można regulować za pomocą parametrów,W trybie ręcznym,Kiedy prędkość małego silnika S2 wynosi 10,
Przełącznik do przodu/do tyłu jest wygięty 3 razy z rzędu,Następnie złam go 3 razy z rzędu,Wprowadź menu parametrów;
Wyjdź z menu parametrów:Wybierz zapisać lub nie,Następnie naciśnij przycisk Włącz, aby potwierdzić wyjście;
Maksymalny prąd:Pracujący prąd silnika tnący,Prąd cięcia wynosi 80% tego prądu;
Parametry regulacji prędkości:Automatyczne parametry sterowania cięciem,Domyślnie 800,Modyfikacja jest zabroniona;
Parametry opóźnienia:Automatyczne parametry sterowania cięciem,Gdy wartość zmiany prądu cięcia przekracza tę wartość,Zacznij zwalniać
Przyspieszenie A1: Automatyczne parametry sterowania cięciem,Gdy prąd cięcia jest niższy niż prąd cięcia,Spędź powoli;
Opóźnienie A2: Automatyczne parametry sterowania cięciem,Gdy prąd cięcia jest wyższy niż prąd cięcia zestawu,Zwolniona prędkość;
Automatyczna kolekcja noża:nieważny;
Zacznij sobie blokowanie:0,Nie zamykaj się;1,Blokowanie się. Naciśnij klawisz Enable + do przodu i do tyłu, aby wejść,I zamknij to;
Maksymalne chodzenie:Minimalna prędkość silnika;
Cięcie prądu:Ustaw maksymalną wartość prądu głównego silnika do automatycznego cięcia,Prąd sprzężenia zwrotnego przekracza tę wartość,Zacznij zwalniać;
Domyślne ograniczenie prędkości:Podczas włączania,Domyślna maksymalna prędkość dla automatycznej prędkości cięcia;
Tryb automatyczny:0,Automatyczny przełącznik to automatyczna kontrola;1,Automatyczne sterowanie przełącznikiem Automatyczny punkt wyjściowy IO;
Przesunięcie ograniczenia prędkości:Podczas automatycznego cięcia,Maksymalna prędkość małego silnika;
Maksymalny gospodarz:Duża maksymalna prędkość silnika.
| Odbiornik działający zasilacz | DC24V/1A (niezależny zasilacz) |
| Obciążenie punktu wyjściowego odbiornika | AC0-250V/3A DC0-30V/5A |
| Napięcie wyjściowe regulacji prędkości odbiornika |
DC0-10V
|