Corte automático de controle remoto sem fio para serra de corda de rastreador
Corda de rastreador viu Machine-Automatom Wireless Remote Control Dh12S-LD
Descrição

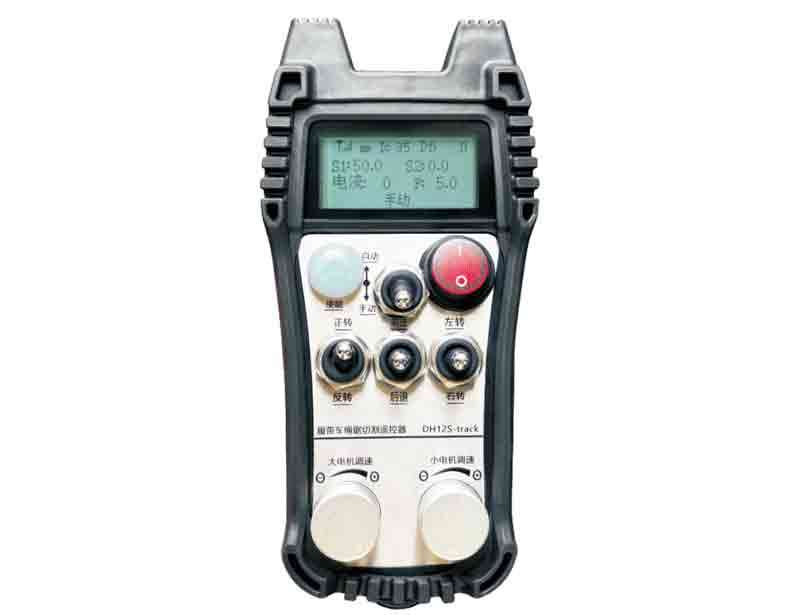
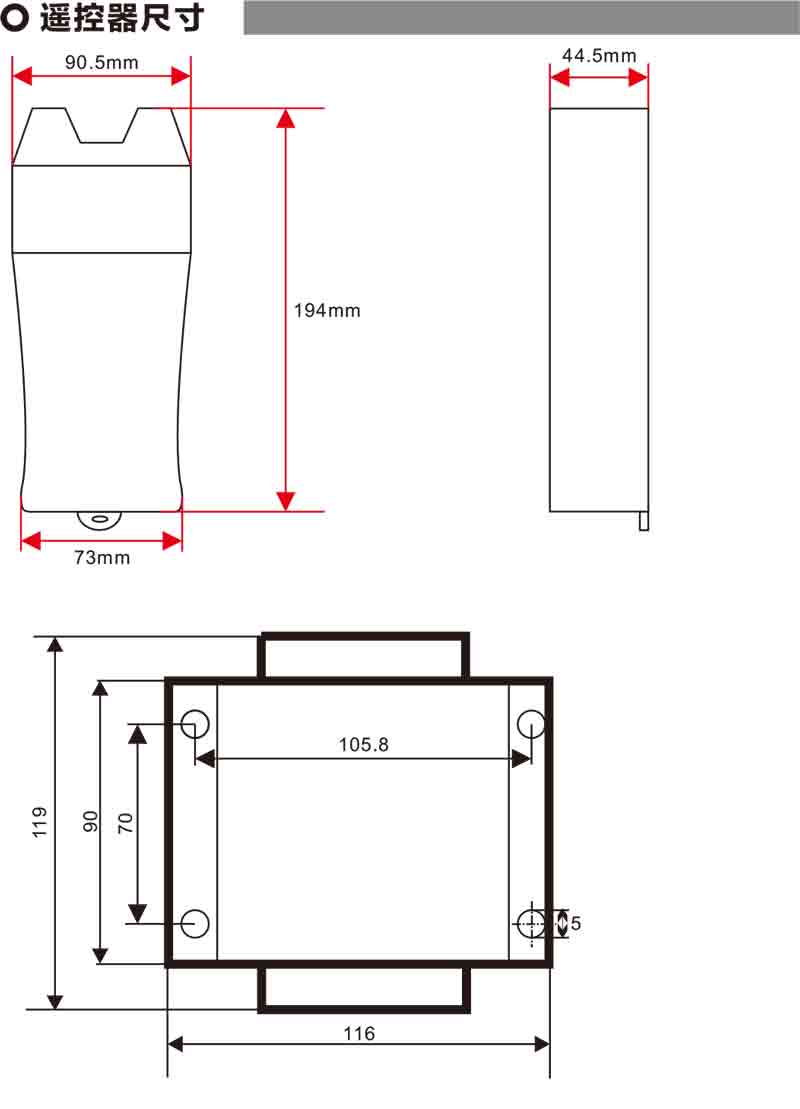
modelo:DH12S-LD Equipamento adaptativo:Máquina de serra de corda de rastreamento

Observação:Três tipos de antenas podem ser selecionados,A antena da copa de sucção padrão é padrão 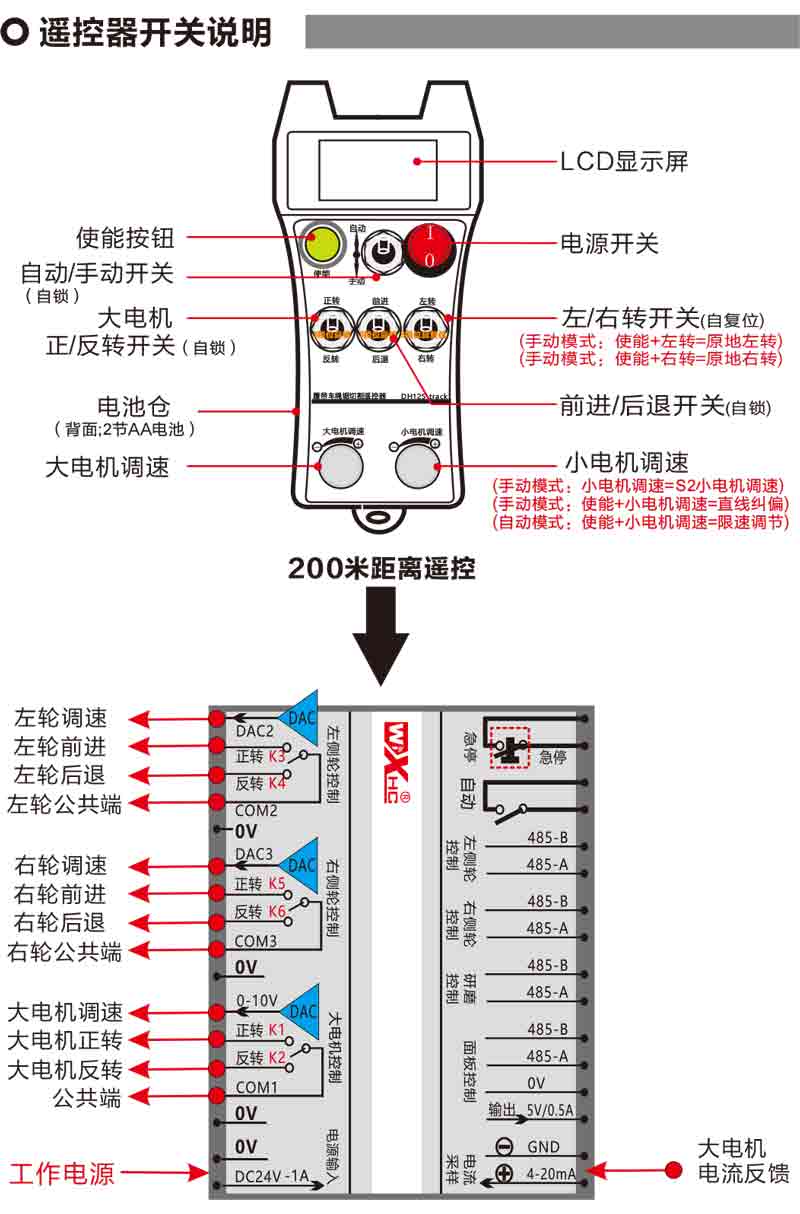

Velocidade grande do motor:S1:0-50
Velocidade pequena do motor:S2:0-50
Limite de velocidade máxima automática do motor de corte automático:F:0-30(Os parâmetros são ajustáveis)
Corrente máxima de corte automático:Ic:0-35(Os parâmetros são ajustáveis)
Valor de correção de desvio linear:Df:-99-99(1 unidade é de aproximadamente 0,02V)
Baixa pressão:A bateria do controle remoto é muito baixo,Substitua a bateria
Cair na internet:Interrupção do sinal sem fio,Verifique a fonte de alimentação do receptor,Poder de novo,Reiniciar o controle remoto
![]()
1、Controle remoto ativado
O receptor está ligado,A luz liderada pela RF no receptor começa a piscar;Duas baterias nº 5 instaladas no controle remoto,Ligue o interruptor,Exibir velocidade do motor Velocidade,Isso significa que a startup é bem -sucedida。
2、Regulação de motor e velocidade grande
Gire o interruptor "para frente/reverso" para a frente,O grande motor do receptor liga,A tela exibe a rotação para a frente ;
;
Gire o interruptor "para frente/reverso" para reverter,Receptor grande reversão do motor em,Exibir inversão de exibição ;
;
;Gire o interruptor "para frente/reverso" para reverter,Receptor grande reversão do motor em,Exibir inversão de exibição
;Gire o botão "grande regulação da velocidade do motor",Ele pode ajustar a tensão de saída do receptor grande regulação da velocidade do motor 0-10V;
3、Regulação de motor e velocidade pequeno
Gire o interruptor "para frente/reverso" para a frente,Receptor Progresso do Revolver e Progresso Right Open,Exibir para a frente
Vire o interruptor "para a frente/reverso" para a parte traseira,Reversão do receptor e reversão da roda direita aberta,Exibir novamente
No modo manual:Gire o botão "Regulação da velocidade do motor pequena",Ao mesmo tempo, ajuste a tensão de saída do regulamento da velocidade da roda direita do receptor 0-10V;
No modo manual:Gire o botão "Regulação da velocidade do motor pequena",Ao mesmo tempo, ajuste a tensão de saída do regulamento da velocidade da roda direita do receptor 0-10V;
4、Vire à esquerda e direita
Vire o interruptor "esquerda/direita" para a esquerda,Receptor Avanços da roda direita para abrir,A tela gira para a esquerda
Gire a mudança "esquerda/direita" para a direita,O avanço do revólver receptor abre,A tela é vira à direita
5、Virando no lugar
No modo manual:
Vire à esquerda no lugar:Pressione e segure o botão Ativar,Vire o interruptor "esquerda/direita" para a esquerda,A reversão do receptor e o avanço da roda direita aberta,Comece a virar à esquerda no lugar;
Vire à direita no lugar:Pressione e segure o botão Ativar,Gire a mudança "esquerda/direita" para a direita,Os avanços do revólver do receptáculo e as costas da direita abrem,Comece a virar à direita no lugar;
6、Ajuste de limite de velocidade do motor pequeno
No modo automático:Pressione e segure o botão Ativar,Gire a "pequena regulação da velocidade do motor" para ajustar a velocidade máxima do pequeno motor durante o corte automático;
7、Corte automático
primeiro passo,Inicie o motor grande;
Etapa 2,Alterne a mudança de modo para "Auto";
Etapa 3,Comece o motor pequeno,A tela da tela entra "Cutting Automatic",Indica que o modo de corte automático foi inserido;
Etapa 2,Alterne a mudança de modo para "Auto";
Etapa 3,Comece o motor pequeno,A tela da tela entra "Cutting Automatic",Indica que o modo de corte automático foi inserido;
8、Correção da linha reta
Quando o motor esquerdo e direito está avançando e para trás,Há uma diferença nas velocidades esquerda e direita,A caminhada linear é deslocada,A função de correção de desvio linear do controle remoto pode ser usado,Ajuste a velocidade das rodas esquerda e direita;
Princípio da correção:Através da função de correção de viés,Velocidade do revólver tune tune,Para alcançar a mesma velocidade que a roda direita,Perceba a sincronização das velocidades da roda esquerda e direita,Eliminar compensações;
Método de operação de correção:No modo manual,Pressione e segure o botão Ativar,Gire "Regulação da velocidade de pequeno motor";
Gire no sentido horário,Aumente a tensão de velocidade do revólver,Valor de correção de desvio aumentado da tela de exibição;
Gire no sentido anti -horário,Reduza a tensão de velocidade do revólver,O valor da correção do desvio da tela é reduzido;
Faixa de correção:Valor de correção -90 a 90;1A tensão de correção de viés de cada unidade de correção de desvio é de aproximadamente 0,02V;
9、Menu do parâmetro (o usuário proíbe a modificação privada)
Algumas funções do controle remoto podem ser ajustadas através de parâmetros,No modo manual,Quando a velocidade do motor pequeno S2 é 10,
O interruptor para frente/reverso é dobrado 3 vezes seguido,Em seguida, quebre 3 vezes seguidas,Digite o menu do parâmetro;
Saia do menu Parâmetros:Escolha salvar ou não,Em seguida, pressione o botão Ativar para confirmar a saída;
Corrente máxima:Corrente de trabalho do motor de corte,A corrente de corte é 80% dessa corrente;
Parâmetros de regulação da velocidade:Parâmetros de controle de corte automático,Padrão 800,Modificação é proibida;
Parâmetros de desaceleração:Parâmetros de controle de corte automático,Quando o valor da mudança de corrente de corte excede este valor,Comece a desacelerar
Aceleração A1: Parâmetros de controle de corte automático,Quando a corrente de corte é menor que a corrente de corte definida,Acelerar lentamente;
Desaceleração A2: Parâmetros de controle de corte automático,Quando a corrente de corte é maior que a corrente de corte definida,Velocidade lenta;
Coleção automática de facas:inválido;
Comece a lutar por si mesmo:0,Não se prenda;1,Auto-bloqueio. Pressione a tecla Ativar + para a frente e reverso para entrar em vigor,E trave -o;
Caminhada máxima:Velocidade mínima do motor;
Corte de corrente:Defina o valor de corrente máxima do motor principal para corte automático,A corrente de feedback excede este valor,Comece a desacelerar;
Limite de velocidade padrão:Ao ligar,Velocidade máxima padrão para velocidade de corte automática;
Modo automático:0,O interruptor automático é controle automático;1,Controle automático de controle automático Io Saída Ponto;
Deslocamento do limite de velocidade:Ao cortar automaticamente,Velocidade máxima do pequeno motor;
Host máximo:Velocidade máxima do motor grande.
| Fonte de alimentação operacional receptor | DC24V/1A (fonte de alimentação independente) |
| Carga do ponto de saída do receptor | AC0-250V/3A DC0-30V/5A |
| Tensão de saída da regulação da velocidade do receptor |
DC0-10V
|