

自動切割無線遙控器,用於履帶繩索鋸
爬行繩鋸機自動自動無線遙控器 DH12S-LD
描述

模型:DH12S-LD 適應式設備:爬行繩索鋸機

備註:可以揀三種天線,預設吸盤天線係標準嘅 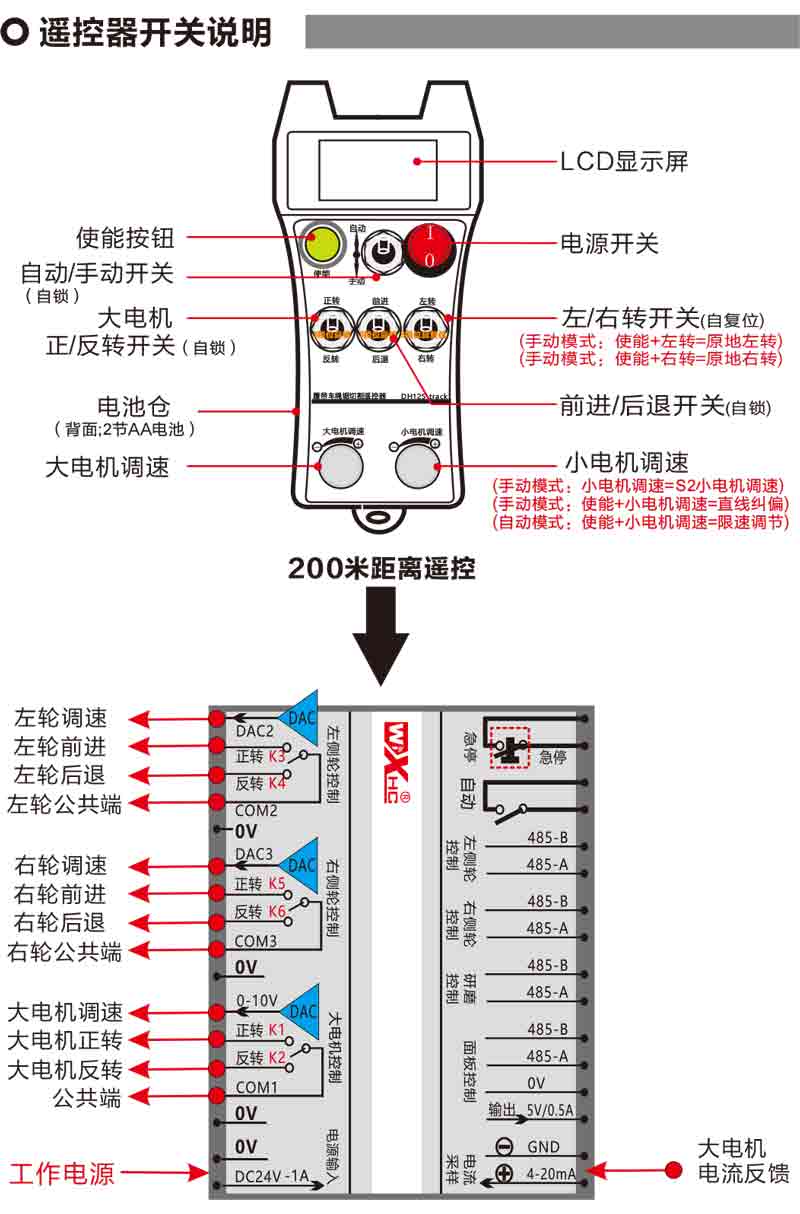

大電機速度:S1:0-50
小電機速度:S2:0-50
自動切割電機最大速度限制:F:0-30( 參數可調節 )
自動切割最大電流:Ic:0-35( 參數可調節 )
線性偏差校正值:Df:-99-99(1 單位約為 0.02V )
低壓:遙控器嘅電池太低,請更換電池
跌出互聯網:無線訊號中斷,請檢查接收電源,再次開機,重新啟動遙控器
![]()
1、遠端控制開啟
接收器係開機,接收器上嘅 RF-LED 燈開始閃爍;遙控器上安裝兩個 5 號電池,開啟電源開關,顯示顯示器電機速度,意思係初創公司成功。
2、大電機同調節速度
轉動「前進 / 反向」開關轉向前進,接收器嘅大電機開咗,顯示屏會顯示向前旋轉 ;
;
將「前進 / 反轉」開關轉為反向,接收器大電機逆轉開啟,顯示顯示屏倒置 ;
;
;將「前進 / 反轉」開關轉為反向,接收器大電機逆轉開啟,顯示顯示屏倒置
;旋轉「大電機速度規矩」旋鈕,佢可以調整接收器大電機速度調節 0-10V 嘅輸出電壓;
3、小型電機同調節速度
轉動「前進 / 反向」開關轉向前進,接收器左輪手槍進度同正確進度開放,向前顯示
將「前進 / 逆」切換轉到背部,接收器逆轉同右輪逆轉開,顯示返
係手動模式下:旋轉「小電機速度規矩」旋鈕,同時,調整接收器咗輪右輪速度調節 0-10V 嘅輸出電壓;
係手動模式下:旋轉「小電機速度規矩」旋鈕,同時,調整接收器咗輪右輪速度調節 0-10V 嘅輸出電壓;
4、左右轉
將「左 / 右」開關轉左邊,接收器右輪會向開,顯示屏顯示咗轉
向右轉「咗 / 右」開關,接收器左輪槍提前開,顯示屏顯示右轉
5、轉到位
係手動模式下:
左轉到位:按住「啟用」按鈕,將「左 / 右」開關轉左邊,接收器嘅逆轉同右車輪都係提前開,開始咗轉咗;
右轉到位:按住「啟用」按鈕,向右轉「咗 / 右」開關,容器嘅左輪槍嘅進步,右輪背部開咗,開始右轉;
6、小型電機限速調整
係自動模式下:按住「啟用」按鈕,旋轉「小電機速度規律」 , 係自動切割期間調整小型電機嘅最大速度;
7、自動切割
第一步,開始大電機;
第 2 步,將模式切換轉為「自動」;
第 3 步,開始小電機,螢幕顯示輸入「切割自動」,表示已經輸入自動切割模式;
第 2 步,將模式切換轉為「自動」;
第 3 步,開始小電機,螢幕顯示輸入「切割自動」,表示已經輸入自動切割模式;
8、直線校正
當左右電機向前同向後移動,左右速度有分別,直線行路係抵消嘅,遙控器嘅線性偏差校正功能可以使用,微調左右輪嘅速度;
糾正原則:透過偏差校正功能,微調左輪槍速度,要達到同右輪嘅速度,實現左右輪速度同步,消除偏移;
矯正操作方法:係手動模式下,按住「啟用」按鈕,旋轉「小電機速度調節」;
順時針旋轉,增加咗輪槍速度電壓,顯示畫面嘅偏差校正值增加;
逆時針旋轉,降低左輪輪速度電壓,顯示偏差校正值會降低;
矯正範圍:矯正價值 -90 至 90;1每個偏差校正單元嘅偏差校正電壓大約係 0.02V;
9、參數選單 ( 用戶禁止私人修改 )
遙控器嘅部分功能可以透過參數調整,係手動模式下,當小型電機 S2 嘅速度係 10,
前進 / 逆開關係連續彎 3 次,然後連續打破 3 次,輸入參數選單;
退出參數選單:選擇儲唔慳,然後按啟用掣確認退出;
最大電流:切割電機嘅運作電流,切割電流係呢個電流嘅 80 %;
速度調節參數:自動切割控制參數,預設 800,禁止修改;
減速參數:自動切割控制參數,當切割電流變化值超過呢個值,開始減慢速度
加速 a1: 自動切割控制參數,當切割電流低於設定切割電流時,慢慢速度;
減速 a2: 自動切割控制參數,當切割電流高於設定切割電流,慢速;
自動刀收藏:無效;
開始自鎖:0,唔好自己鎖;1,自鎖。按下啟用鍵 + 向前和逆向生效,同埋鎖住佢;
最大行路:最低電機速度;
切割電流:設定主電機最大電流值,用於自動切割,反饋電流超過呢個值,開始減慢速度;
預設速度限制:開機時,預設最高速度,以便自動切割速度;
自動模式:0,自動開關係自動控制;1,自動開關控制自動 IO 輸出點;
速度限制偏移:自動切割時,小型電機嘅最大速度;
最大主機:大電機最大速度.
| 接收器運作電源 | DC24V / 1A (獨立電源) |
| 接收器輸出點負荷 | AC0-250V / 3A 直流 0-30V / 5A |
| 接收器速度調節輸出電壓 |
DC0-10V
|




.png)
