Control remoto inalámbrico de corte automático para sierra de cuerda rastreadora
Crawler Saw Saw Machine-Automático Control remoto inalámbrico DH12S-LD
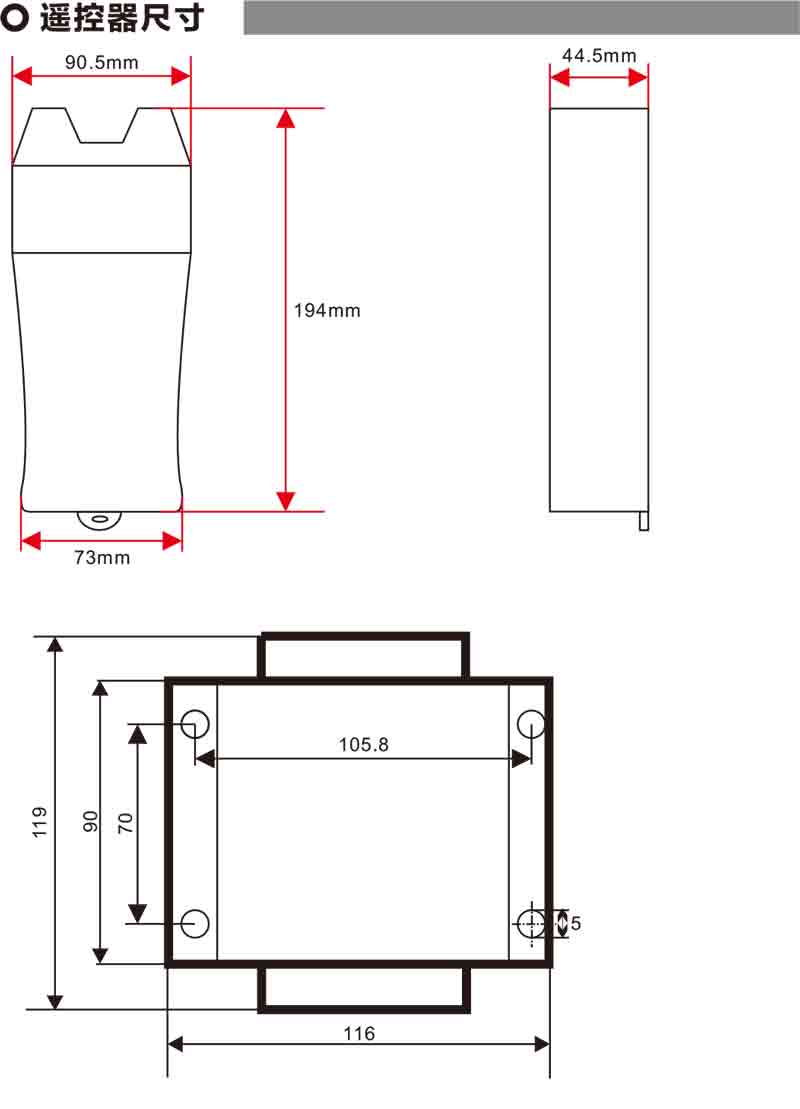
Descripción

modelo:DH12S-LD Equipo adaptativo:Máquina de aserradero de la cuerda del rastreador

Observación:Se pueden seleccionar tres tipos de antenas,La antena de taza de succión predeterminada está equipada con estándar 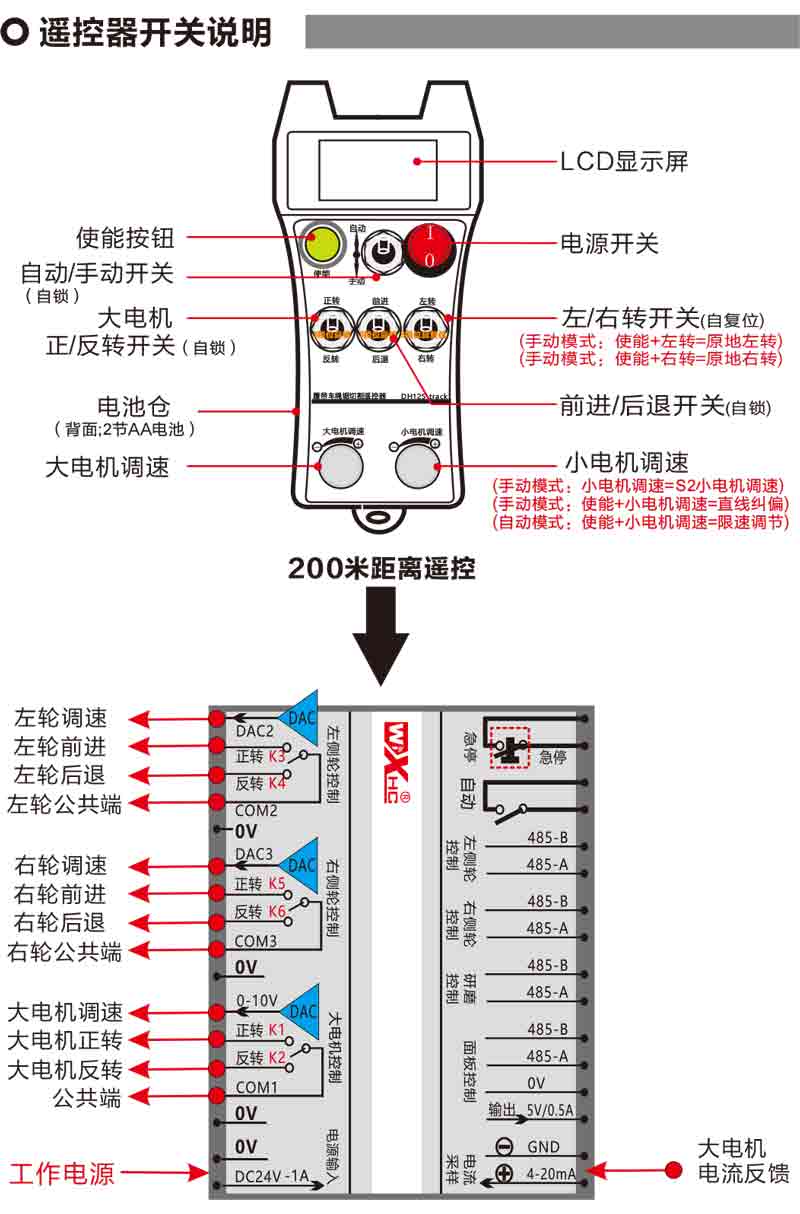

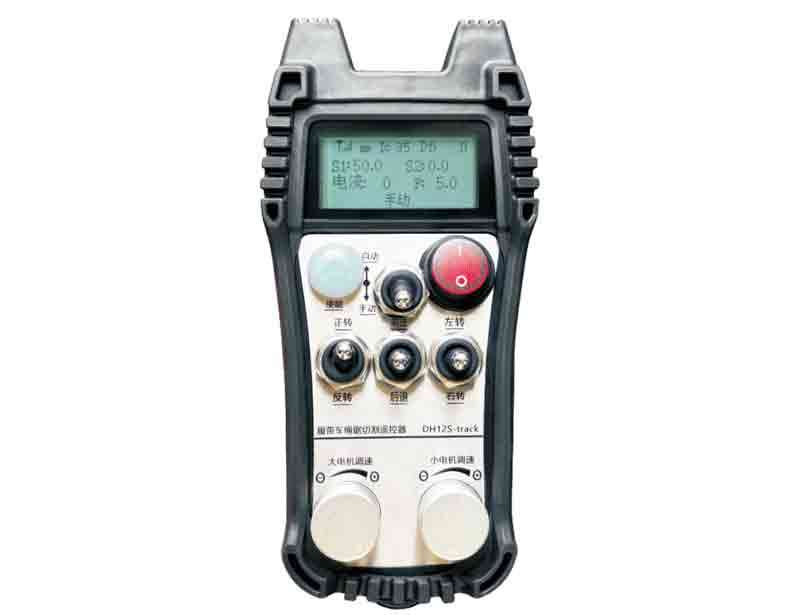
Velocidad del motor grande:S1:0-50
Velocidad del motor pequeño:S2:0-50
Límite de velocidad máxima del motor de corte automático:F:0-30(Los parámetros son ajustables)
Corriente máxima de corte automático:Beer:0-35(Los parámetros son ajustables)
Valor de corrección de desviación lineal:Df:-99-99(1 unidad es aproximadamente 0.02V)
Baja presión:La batería del control remoto es demasiado baja,Reemplace la batería
Caer de Internet:Interrupción de señal inalámbrica,Verifique la fuente de alimentación del receptor,Encender de nuevo,Reiniciar el control remoto
![]()
1、Control remoto encendido
El receptor está encendido,La luz dirigida por RF en el receptor comienza a parpadear;Dos baterías No. 5 instaladas en el control remoto,Encienda el interruptor de encendido,Pantalla Velocidad del motor,Significa que la inicio es exitosa。
2、Gran regulación de motor y velocidad
Gire el interruptor "hacia adelante/reverso" hacia adelante,El motor grande del receptor se enciende,La pantalla muestra la rotación hacia adelante ;
;
Gire el interruptor "hacia adelante/reverso" a revertir,Receptor reversión del motor grande,Pantalla de inversión de visualización ;
;
;Gire el interruptor "hacia adelante/reverso" a revertir,Receptor reversión del motor grande,Pantalla de inversión de visualización
;Gire la perilla "Regulación de velocidad del motor grande",Puede ajustar el voltaje de salida del receptor regulación de velocidad del motor grande 0-10V;
3、Regulación de motor pequeño y velocidad
Gire el interruptor "hacia adelante/reverso" hacia adelante,Progreso del revólver del receptor y progreso correcto Abierto,Mostrar adelante
Gire el interruptor "hacia adelante/reverso" a la parte posterior,Reversión del receptor y reversión de la rueda derecha,Volver a visualizar
En modo manual:Gire la perilla "Regulación de velocidad del motor pequeño",Al mismo tiempo, ajuste el voltaje de salida del reglamento de velocidad de la rueda derecha del rueda izquierda del receptor 0-10V;
En modo manual:Gire la perilla "Regulación de velocidad del motor pequeño",Al mismo tiempo, ajuste el voltaje de salida del reglamento de velocidad de la rueda derecha del rueda izquierda del receptor 0-10V;
4、Gire a la izquierda y a la derecha
Gire el interruptor de "izquierda/derecha" hacia la izquierda,Receptor La rueda derecha avanza para abrir,La pantalla de visualización gira a la izquierda
Gire el interruptor de "izquierda/derecha" hacia la derecha,Se abre el avance del revólver del receptor,La pantalla de visualización gira a la derecha
5、Girando en su lugar
En modo manual:
Gire a la izquierda en su lugar:Mantenga presionado el botón Habilitar,Gire el interruptor de "izquierda/derecha" hacia la izquierda,Reversión del receptor y avance de la rueda derecha abierta,Empiece a girar a la izquierda en su lugar;
Gire a la derecha en su lugar:Mantenga presionado el botón Habilitar,Gire el interruptor de "izquierda/derecha" hacia la derecha,Los avances del revólver del receptáculo y las espaldas de la rueda derecha se abre,Empiece a girar a la derecha en su lugar;
6、Ajuste del límite de velocidad del motor pequeño
En modo automático:Mantenga presionado el botón Habilitar,Gire la "regulación de la velocidad del motor pequeño" para ajustar la velocidad máxima del motor pequeño durante el corte automático;
7、Corte automático
primer paso,Arrancar el motor grande;
Paso 2,Cambie el modelador de modo a "Auto";
Paso 3,Arrancar el motor pequeño,La pantalla de la pantalla ingresa a "cortar automático",Indica que se ha ingresado el modo de corte automático;
Paso 2,Cambie el modelador de modo a "Auto";
Paso 3,Arrancar el motor pequeño,La pantalla de la pantalla ingresa a "cortar automático",Indica que se ha ingresado el modo de corte automático;
8、Corrección de línea recta
Cuando el motor izquierdo y derecho se mueve hacia adelante y hacia atrás,Hay una diferencia en las velocidades de izquierda y derecha.,Caminar en línea recta se compensa,Se puede utilizar la función de corrección de desviación lineal del control remoto,Tin une la velocidad de las ruedas izquierda y derecha;
Principio de corrección:A través de la función de corrección de sesgo,Velocidad del revólver de ajuste fino,Para lograr la misma velocidad que la rueda derecha,Darse cuenta de la sincronización de las velocidades de la rueda izquierda y derecha,Eliminar las compensaciones;
Método de operación de corrección:En modo manual,Mantenga presionado el botón Habilitar,Gire "Regulación de velocidad del motor pequeño";
Girar en sentido horario,Aumentar el voltaje de velocidad del revólver,Mayor valor de corrección de desviación de la pantalla;
Girar en sentido antihorario,Reducir el voltaje de velocidad del revólver,El valor de corrección de desviación de la pantalla se reduce;
Rango de corrección:Valor de corrección -90 a 90;1El voltaje de corrección de sesgo de cada unidad de corrección de desviación es de aproximadamente 0.02V;
9、Menú de parámetros (el usuario prohíbe la modificación privada)
Algunas funciones del control remoto se pueden ajustar a través de parámetros,En modo manual,Cuando la velocidad del motor pequeño S2 es 10,
El interruptor hacia adelante/inverso se dobla 3 veces seguidas,Luego rómpelo 3 veces seguidas,Ingrese el menú de parámetros;
Salir del menú de parámetros:Elegir guardar o no,Luego presione el botón Habilitar para confirmar la salida;
Corriente máxima:Corriente de trabajo del motor de corte,La corriente de corte es el 80% de esta corriente;
Parámetros de regulación de velocidad:Parámetros de control de corte automático,Valor predeterminado 800,Se prohíbe la modificación;
Parámetros de desaceleración:Parámetros de control de corte automático,Cuando el valor de cambio de corriente de corte excede este valor,Empiece a disminuir
Aceleración A1: Parámetros de control de corte automático,Cuando la corriente de corte es más baja que la corriente de corte del conjunto,Acelera lentamente;
Desaceleración A2: Parámetros de control de corte automático,Cuando la corriente de corte es más alta que la corriente de corte del conjunto,Velocidad lenta;
Colección automática de cuchillos:inválido;
Empiece a la madrugada:0,No te bloquees;1,Bloqueo automático. Presione la tecla Habilitar + hacia adelante y hacia atrás para entrar en vigencia,Y bloquearlo;
Caminata máxima:Velocidad del motor mínimo;
Corriente de corte:Establezca el valor de corriente máximo del motor principal para corte automático,La corriente de retroalimentación excede este valor,Empiece a disminuir;
Límite de velocidad predeterminado:Al encender,Velocidad máxima predeterminada para la velocidad de corte automática;
Modo automático:0,El interruptor automático es control automático;1,Control de interruptor automático Punto de salida automático de IO;
Desplazamiento del límite de velocidad:Al cortar automáticamente,Velocidad máxima del motor pequeño;
Host máximo:Velocidad máxima del motor grande.
| Fuente de alimentación operativa del receptor | DC24V/1A (fuente de alimentación independiente) |
| Carga de punto de salida del receptor | AC0-250V/3A DC0-30V/5A |
| Voltaje de salida de regulación de la velocidad del receptor |
DC0-10V
|